





Antwerpen, 5 november 2016. PBN, GNSS, RNP,… Piloten die IFR vliegen, moeten binnenkort weer naar de lesbanken om deze acroniemen, en de systemen die ermee uitgerust zijn, onder de knie te krijgen. De ingebuikname van GPS-gebaseerde naderingsprocedures vereist immers een bijscholing met een nieuwe rating. Ook voor VFR-piloten is deze evolutie interessant om volgen. In dit artikel geven we een kort overzicht van dit allemaal inhoudt.
GPS is voor vele beroeps- en vrijetijdspiloten niet meer weg te denken uit de cockpit. De prijzen voor toestellen zijn immers schappelijk voor wat ze bieden en voor een hobbypiloot die enkel onder zichtregels vliegt, bestaan er zelfs apps voor op de tablet of smartphone.
 | Glazen cockpits met GPS en moving map zijn niet meer weg te denken uit de luchtvaart. Zelfs in kleinere toestellen, zoals in deze Diamond, zijn ze meer en meer een standaard uitrusting. – foto Guy Viselé |
Het gebruik van satellietnavigatie (GPS is geen correcte naam, zoals we later zien) was echter beperkt tot het navigatiegedeelte van de vlucht. Vertrek en nadering gebeurde nog met traditionele middelen gebaseerd op een radiosignaal dat vanaf een baken op de grond uitgestuurd wordt.
De installatie en het onderhoud van dergelijke bakens is echter erg duur, wat maakt dat in België slechts een handvol velden een dergelijk systeem hebben.
Ook aan de maatschappijen kosten dergelijk systemen meer dan zou moeten. De procedures zijn immers zo opgezet dat er in “trappen” gedaald wordt tot een vliegtuig de finale nadering kan inzetten. Telkens zo’n trap bereikt is, moet gas gegeven worden om de hoogte aan te houden.
Hoewel de veiligheid van de traditionele naderingen zeer hoog is, kan het nog altijd beter. Een zwakke schakel is immers de hoogtemeter in de vliegtuigen welke door een piloot ingesteld wordt met de lokale luchtdruk. In het verleden zijn er al crashes geweest door zo’n foute instelling waarbij een toestel uiteindelijk veel lager vloog dan de bedoeling was.
Bovenstaande problemen worden verholpen door gebruik te maken van naderingsprocedures gebaseerd op de signalen van GNSS – oftewel ‘Global Navigation Satellite Systems’. Wanneer met het heeft over het Amerikaanse GPS is dit slechts één van dit type systemen. Ook Rusland (Glonass), Europa (Galileo) en China (Beidou) hebben eigen navigatiesatellieten om niet afhankelijk te zijn van het Amerikaanse signaal.
Is ‘GPS’ niet correct genoeg?
Hoewel we al meer dan 20 jaar gebruik maken van het GPS signaal voor en-route 2D-navigatie, vormde het 3D-aspect in een eindnadering nog een uitdaging. Zo is het coördinatenstelsel waar GPS van uitgaat, gebaseerd op een perfecte bol, terwijl de aarde eigenlijk meer weg heeft van een platgedrukte sfeer. Ook vallen er van tijd tot tijd satellieten uit, of loopt de interne atoomklok van zo’n satelliet mogelijk niet synchroon met de andere. Op zich allemaal kleine fouten, maar de combinatie ervan kan leiden tot afwijkingen van honderden meters. Wanneer dit tijdens een navigatie is, is dit niet erg, maar een hoogteverschil van 100 meter bij een eindnadering met beperkt zicht is potentieel dodelijk.
Om dit probleem aan te pakken, moet de berekende positie “verbeterd” worden. Het Europese EGNOS en het Amerikaanse WAAS zijn de gekendste SBAS’s (‘Space Based Augmentation System’) die gebruik maken van geostationaire satellieten. Deze hebben een gekende, vaste, plaats boven het aardoppervlak en kunnen al bijkomend “ijkpunt” dienen.
Ook van bakens op de grond is de positie gekend. Ze kunnen de afwijking van de navigatiesatellieten berekenen en doorsturen naar GNSS ontvangers in de buurt. In dit geval spreken we van GBAS (‘Ground Based Augmentation System’).
Een derde vorm van verbetering is in de lucht door het systematisch vergelijken van de signalen van de verschillende satellieten en de positie die ermee berekend wordt. Als blijkt dat er een systematische afwijking is, wordt met de satelliet in kwestie geen rekening meer gehouden in volgende berekeningen. Om een dergelijke RAIM (‘Receiver autonomous integrity monitoring’) controle te doen, moeten dus meer satellieten beschikbaar zijn dan strikt nodig voor de navigatie. Dit kan gecontroleerd worden tijdens de vluchtvoorbereiding door te controleren of er voldoende satellieten beschikbaar zullen zijn in het gebied dat doorvlogen wordt. Ook vlak voor de eindnadering moet een RAIM-check gebeuren.
Een precisienadering die enkel gebruik maakt van satellietgegevens, kan dus enkel maar correct en veilig gebeuren als het vliegtuig is voorzien van een minimale uitrusting om deze verbeteringen te doen. We spreken van de RNP oftewel ‘Required Navigation Performance’.
3D navigatie tot op de grond (of toch bijna)
Als een vliegtuig voorzien is van de juiste uitrusting, kan een PBN (‘Performance Based Navigation’) aangevat worden. Deze houdt niet alleen rekening met de weg die afgelegd wordt, maar ook met het hoogtepatroon. Het zal ervoor zorgen dat de daling zo geleidelijk mogelijk verloopt zodat er brandstof bespaard wordt; tevens is er minder geluidshinder op de grond.
Afhankelijk van het type uitrusting, zal de nadering tot op een lagere hoogte gevlogen kunnen worden alvorens de piloot moet beslissen om al dan niet te landen. Het is momenteel niet de bedoeling om de precisie-naderingen met ILS te vervangen. Sommige van deze zijn nauwkeurig genoeg om helemaal tot op de grond te vliegen op instrumenten.
De RNP-approaches vervangen dus enkel de niet-precisie naderingen zoals bijvoorbeeld de localiser-procedures.
In toenemende volgorde van precisie spreken we van:
- LNAV: er is geen signaalverbetering, en ook geen verticale begeleiding
- LP: geen verticale begeleiding, maar wél signaalverbetering. Dit is de precisie van een localiser
- LNAV/VNAV: LNAV, maar met een verticale begeleiding gebaseerd op de hoogtemeter
- LPV: Zowel de positie als de hoogte zijn verbeterd en worden gebruikt.
Met deze laatste procedure kan een beslissingshoogte van 200 voet boven de grond bekomen worden. Niet alleen de uitrusting van het vliegtuig is van belang. Als een crew gebruik wil maken van PBN, moet ze hier voor gekwalificeerd zijn middels een aantekening in het logboek. Deze kan bekomen worden door met een instructeur een aantal theoretische en praktische lessen te doorlopen.
Ook voor VFR-piloten zijn er gevolgen. De invoering van PBN is een opportuniteit om een aantal NDB’s en VOR’s te schrappen. Zo zullen in België ‘Mackel’ en ‘Londi’ de eerste zijn om van de kaarten te verdwijnen.
Op lange termijn gaat het mogelijk zo ver dat alle ILS naderingen vervangen gaan worden door PBN met GLS (‘GPS Landing System’), maar zo ver zijn we nog niet. De grond-gebaseerde verbetersignalen blijken op dit moment nog niet zo veilig en eenvoudig in te voeren als gedacht, en een zonnestorm kan het wereldwijde GNSS-signaal grondig verstoren zodat een betrouwbaar alternatief nodig blijft.
Peter Snoeckx
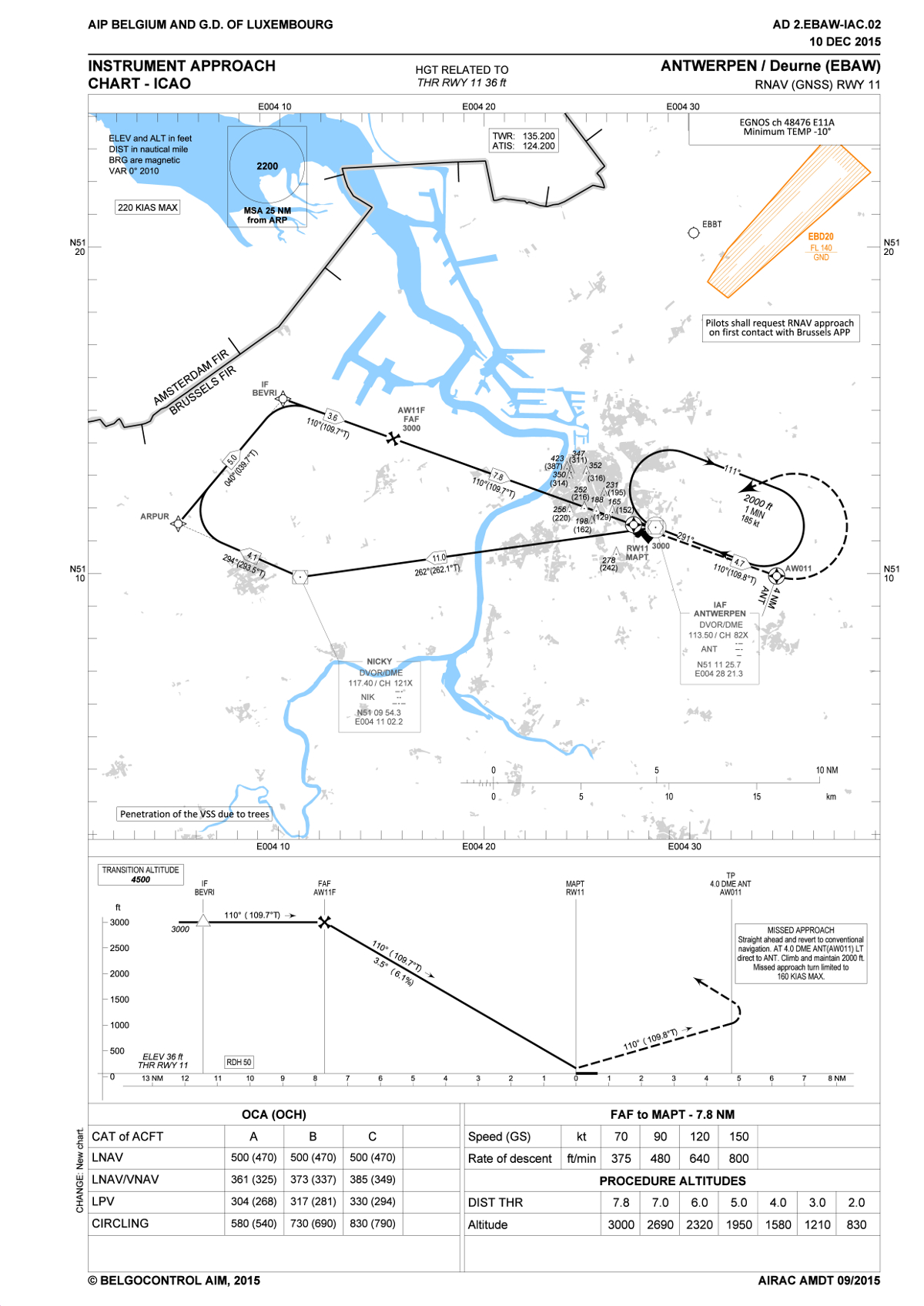 | “EBAW RNAV (GNSS) RWY 11” was in december 2015 de eerste PBN approach in België. Tegen 2018 moeten er in België 25 dergelijke naderingen zijn. Duidelijk aangegeven is de ‘Obstacle Clearance Altitude’ voor de verschillende types naderingen. Afbeelding Belgocontrol |




